排序与查找
算法(Algorithm)是将一组输入转化成一组输出的一系列计算步骤,其中每个步骤必须能在有限时间内完成。比如第 3 节 “递归”习题1中的Euclid算法,输入是两个正整数,输出是它们的最大公约数,计算步骤是取模、比较等操作,这个算法一定能在有限的步骤和时间内完成(想一想为什么?)。再比如将一组数从小到大排序,输入是一组原始数据,输出是排序之后的数据,计算步骤包括比较、移动数据等操作。
算法是用来解决一类计算问题的,注意是一类问题,而不是一个特定的问题。例如,一个排序算法应该能对任意一组数据进行排序,而不是仅对int a[] = { 1,
3, 4, 2, 6, 5 };这样一组数据排序,如果只需要对这一组数据排序可以写这样一个函数来做:
void sort(void)
{
a[0] = 1;
a[1] = 2;
a[2] = 3;
a[3] = 4;
a[4] = 5;
a[5] = 6;
}
这显然不叫算法,因为不具有通用性。由于算法是用来解决一类问题的,它必须能够正确地解决这一类问题中的任何一个实例,这个算法才是正确的。对于排序算法,任意输入一组数据,它必须都能输出正确的排序结果,这个排序算法才是正确的。不正确的算法有两种可能,一是对于该问题的某些输入,该算法会无限计算下去,不会终止,二是对于该问题的某些输入,该算法终止时输出的是错误的结果。有时候不正确的算法也是有用的,如果对于某个问题寻求正确的算法很困难,而某个不正确的算法可以在有限时间内终止,并且能把误差控制在一定范围内,那么这样的算法也是有实际意义的。例如有时候寻找最优解的开销很大,往往会选择能给出次优解的算法。
本章介绍几种典型的排序和查找算法,并围绕这几种算法做时间复杂度分析。学完本章之后如果想进一步学习,可以参考一些全面系统地介绍算法的书,例如[TAOCP]和[算法导论]。
插入排序算法类似于玩扑克时抓牌的过程,玩家每拿到一张牌都要插入到手中已有的牌里,使之从小到大排好序。例如(该图出自[算法导论]):
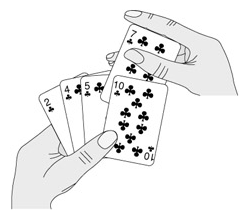
也许你没有意识到,但其实你的思考过程是这样的:现在抓到一张7,把它和手里的牌从右到左依次比较,7比10小,应该再往左插,7比5大,好,就插这里。为什么比较了10和5就可以确定7的位置?为什么不用再比较左边的4和2呢?因为这里有一个重要的前提:手里的牌已经是排好序的。现在我插了7之后,手里的牌仍然是排好序的,下次再抓到的牌还可以用这个方法插入。
编程对一个数组进行插入排序也是同样道理,但和插入扑克牌有一点不同,不可能在两个相邻的存储单元之间再插入一个单元,因此要将插入点之后的数据依次往后移动一个单元。排序算法如下:
例 11.1. 插入排序
#include <stdio.h>
#define LEN 5
int a[LEN] = { 10, 5, 2, 4, 7 };
void insertion_sort(void)
{
int i, j, key;
for (j = 1; j < LEN; j++) {
printf("%d, %d, %d, %d, %d\n",
a[0], a[1], a[2], a[3], a[4]);
key = a[j];
i = j - 1;
while (i >= 0 && a[i] > key) {
a[i+1] = a[i];
i--;
}
a[i+1] = key;
}
printf("%d, %d, %d, %d, %d\n",
a[0], a[1], a[2], a[3], a[4]);
}
int main(void)
{
insertion_sort();
return 0;
}
为了更清楚地观察排序过程,我们在每次循环开头插了打印语句,在排序结束后也插了打印语句。程序运行结果是:
10, 5, 2, 4, 7 5, 10, 2, 4, 7 2, 5, 10, 4, 7 2, 4, 5, 10, 7 2, 4, 5, 7, 10
如何严格证明这个算法是正确的?换句话说,只要反复执行该算法的for循环体,执行LEN-1次,就一定能把数组a排好序,而不管数组a的原始数据是什么,如何证明这一点呢?我们可以借助Loop Invariant的概念和数学归纳法来理解循环结构的算法,假如某个判断条件满足以下三条准则,它就称为Loop Invariant:
-
第一次执行循环体之前该判断条件为真。
-
如果“第N-1次循环之后(或者说第N次循环之前)该判断条件为真”这个前提可以成立,那么就有办法证明第N次循环之后该判断条件仍为真。
-
如果在所有循环结束后该判断条件为真,那么就有办法证明该算法正确地解决了问题。
只要我们找到这个Loop Invariant,就可以证明一个循环结构的算法是正确的。上述插入排序算法的Loop Invariant是这样的判断条件:第j次循环之前,子序列a[0..j-1]是排好序的。在上面的打印结果中,我把子序列a[0..j-1]加粗表示。下面我们验证一下Loop
Invariant的三条准则:
-
第一次执行循环之前,
j=1,子序列a[0..j-1]只有一个元素a[0],只有一个元素的序列显然是排好序的。 -
第
j次循环之前,如果“子序列a[0..j-1]是排好序的”这个前提成立,现在要把key=a[j]插进去,按照该算法的步骤,把a[j-1]、a[j-2]、a[j-3]等等比key大的元素都依次往后移一个,直到找到合适的位置给key插入,就能证明循环结束时子序列a[0..j]是排好序的。就像插扑克牌一样,“手中已有的牌是排好序的”这个前提很重要,如果没有这个前提,就不能证明再插一张牌之后也是排好序的。 -
当循环结束时,
j=LEN,如果“子序列a[0..j-1]是排好序的”这个前提成立,那就是说a[0..LEN-1]是排好序的,也就是说整个数组a的LEN个元素都排好序了。
可见,有了这三条,就可以用数学归纳法证明这个循环是正确的。这和第 3 节 “递归”证明递归程序正确性的思想是一致的,这里的第一条就相当于递归的Base Case,第二条就相当于递归的递推关系。这再次说明了递归和循环是等价的。
解决同一个问题可以有很多种算法,比较评价算法的好坏,一个重要的标准就是算法的时间复杂度。现在研究一下插入排序算法的执行时间,按照习惯,输入长度LEN以下用n表示。设循环中各条语句的执行时间分别是c1、c2、c3、c4、c5这样五个常数[23]:
void insertion_sort(void) 执行时间
{
int i, j, key;
for (j = 1; j < LEN; j++) {
key = a[j]; c1
i = j - 1; c2
while (i >= 0 && a[i] > key) {
a[i+1] = a[i]; c3
i--; c4
}
a[i+1] = key; c5
}
}
显然外层for循环的执行次数是n-1次,假设内层的while循环执行m次,则总的执行时间粗略估计是(n-1)*(c1+c2+c5+m*(c3+c4))。当然,for和while后面()括号中的赋值和条件判断的执行也需要时间,而我没有设一个常数来表示,这不影响我们的粗略估计。
这里有一个问题,m不是个常数,也不取决于输入长度n,而是取决于具体的输入数据。在最好情况下,数组a的原始数据已经排好序了,while循环一次也不执行,总的执行时间是(c1+c2+c5)*n-(c1+c2+c5),可以表示成an+b的形式,是n的线性函数(Linear
Function)。那么在最坏情况(Worst Case)下又如何呢?所谓最坏情况是指数组a的原始数据正好是从大到小排好序的,请读者想一想为什么这是最坏情况,然后把上式中的m替换掉算一下执行时间是多少。
数组a的原始数据属于最好和最坏情况的都比较少见,如果原始数据是随机的,可称为平均情况(Average Case)。如果原始数据是随机的,那么每次循环将已排序的子序列a[1..j-1]与新插入的元素key相比较,子序列中平均都有一半的元素比key大而另一半比key小,请读者把上式中的m替换掉算一下执行时间是多少。最后的结论应该是:在最坏情况和平均情况下,总的执行时间都可以表示成an2+bn+c的形式,是n的二次函数(Quadratic
Function)。
在分析算法的时间复杂度时,我们更关心最坏情况而不是最好情况,理由如下:
-
最坏情况给出了算法执行时间的上界,我们可以确信,无论给什么输入,算法的执行时间都不会超过这个上界,这样为比较和分析提供了便利。
-
对于某些算法,最坏情况是最常发生的情况,例如在数据库中查找某个信息的算法,最坏情况就是数据库中根本不存在该信息,都找遍了也没有,而某些应用场合经常要查找一个信息在数据库中存在不存在。
-
虽然最坏情况是一种悲观估计,但是对于很多问题,平均情况和最坏情况的时间复杂度差不多,比如插入排序这个例子,平均情况和最坏情况的时间复杂度都是输入长度n的二次函数。
比较两个多项式a1n+b1和a2n2+b2n+c2的值(n取正整数)可以得出结论:n的最高次指数是最主要的决定因素,常数项、低次幂项和系数都是次要的。比如100n+1和n2+1,虽然后者的系数小,当n较小时前者的值较大,但是当n>100时,后者的值就远远大于前者了。如果同一个问题可以用两种算法解决,其中一种算法的时间复杂度为线性函数,另一种算法的时间复杂度为二次函数,当问题的输入长度n足够大时,前者明显优于后者。因此我们可以用一种更粗略的方式表示算法的时间复杂度,把系数和低次幂项都省去,线性函数记作Θ(n),二次函数记作Θ(n2)。
Θ(g(n))表示和g(n)同一量级的一类函数,例如所有的二次函数f(n)都和g(n)=n2属于同一量级,都可以用Θ(n2)来表示,甚至有些不是二次函数的也和n2属于同一量级,例如2n2+3lgn。“同一量级”这个概念可以用下图来说明(该图出自[算法导论]):
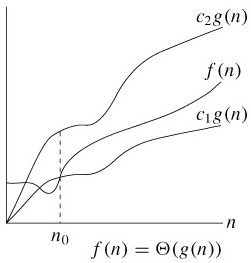
如果可以找到两个正的常数c1和c2,使得n足够大的时候(也就是n≥n0的时候)f(n)总是夹在c1g(n)和c2g(n)之间,就说f(n)和g(n)是同一量级的,f(n)就可以用Θ(g(n))来表示。
以二次函数为例,比如1/2n2-3n,要证明它是属于Θ(n2)这个集合的,我们必须确定c1、c2和n0,这些常数不随n改变,并且当n≥n0以后,c1n2≤1/2n2-3n≤c2n2总是成立的。为此我们从不等式的每一边都除以n2,得到c1≤1/2-3/n≤c2。见下图:
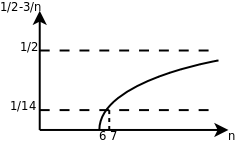
这样就很容易看出来,无论n取多少,该函数一定小于1/2,因此c2=1/2,当n=6时函数值为0,n>6时该函数都大于0,可以取n0=7,c1=1/14,这样当n≥n0时都有1/2-3/n≥c1。通过这个证明过程可以得出结论,当n足够大时任何an2+bn+c都夹在c1n2和c2n2之间,相对于n2项来说bn+c的影响可以忽略,a可以通过选取合适的c1、c2来补偿。
几种常见的时间复杂度函数按数量级从小到大的顺序依次是:Θ(lgn),Θ(sqrt(n)),Θ(n),Θ(nlgn),Θ(n2),Θ(n3),Θ(2n),Θ(n!)。其中,lgn通常表示以10为底n的对数,但是对于Θ-notation来说,Θ(lgn)和Θ(log2n)并无区别(想一想这是为什么),在算法分析中lgn通常表示以2为底n的对数。可是什么算法的时间复杂度里会出现lgn呢?回顾插入排序的时间复杂度分析,无非是循环体的执行时间乘以循环次数,只有加和乘运算,怎么会出来lg呢?下一节归并排序的时间复杂度里面就有lg,请读者留心lg运算是从哪出来的。
除了Θ-notation之外,表示算法的时间复杂度常用的还有一种Big-O notation。我们知道插入排序在最坏情况和平均情况下时间复杂度是Θ(n2),在最好情况下是Θ(n),数量级比Θ(n2)要小,那么总结起来在各种情况下插入排序的时间复杂度是O(n2)。Θ的含义和“等于”类似,而大O的含义和“小于等于”类似。
插入排序算法采取增量式(Incremental)的策略解决问题,每次添一个元素到已排序的子序列中,逐渐将整个数组排序完毕,它的时间复杂度是O(n2)。下面介绍另一种典型的排序算法--归并排序,它采取分而治之(Divide-and-Conquer)的策略,时间复杂度是Θ(nlgn)。归并排序的步骤如下:
-
Divide: 把长度为n的输入序列分成两个长度为n/2的子序列。
-
Conquer: 对这两个子序列分别采用归并排序。
-
Combine: 将两个排序好的子序列合并成一个最终的排序序列。
在描述归并排序的步骤时又调用了归并排序本身,可见这是一个递归的过程。
例 11.2. 归并排序
#include <stdio.h>
#define LEN 8
int a[LEN] = { 5, 2, 4, 7, 1, 3, 2, 6 };
void merge(int start, int mid, int end)
{
int n1 = mid - start + 1;
int n2 = end - mid;
int left[n1], right[n2];
int i, j, k;
for (i = 0; i < n1; i++) /* left holds a[start..mid] */
left[i] = a[start+i];
for (j = 0; j < n2; j++) /* right holds a[mid+1..end] */
right[j] = a[mid+1+j];
i = j = 0;
k = start;
while (i < n1 && j < n2)
if (left[i] < right[j])
a[k++] = left[i++];
else
a[k++] = right[j++];
while (i < n1) /* left[] is not exhausted */
a[k++] = left[i++];
while (j < n2) /* right[] is not exhausted */
a[k++] = right[j++];
}
void sort(int start, int end)
{
int mid;
if (start < end) {
mid = (start + end) / 2;
printf("sort (%d-%d, %d-%d) %d %d %d %d %d %d %d %d\n",
start, mid, mid+1, end,
a[0], a[1], a[2], a[3], a[4], a[5], a[6], a[7]);
sort(start, mid);
sort(mid+1, end);
merge(start, mid, end);
printf("merge (%d-%d, %d-%d) to %d %d %d %d %d %d %d %d\n",
start, mid, mid+1, end,
a[0], a[1], a[2], a[3], a[4], a[5], a[6], a[7]);
}
}
int main(void)
{
sort(0, LEN-1);
return 0;
}
执行结果是:
sort (0-3, 4-7) 5 2 4 7 1 3 2 6 sort (0-1, 2-3) 5 2 4 7 1 3 2 6 sort (0-0, 1-1) 5 2 4 7 1 3 2 6 merge (0-0, 1-1) to 2 5 4 7 1 3 2 6 sort (2-2, 3-3) 2 5 4 7 1 3 2 6 merge (2-2, 3-3) to 2 5 4 7 1 3 2 6 merge 0-1, 2-3) to 2 4 5 7 1 3 2 6 sort (4-5, 6-7) 2 4 5 7 1 3 2 6 sort (4-4, 5-5) 2 4 5 7 1 3 2 6 merge (4-4, 5-5) to 2 4 5 7 1 3 2 6 sort (6-6, 7-7) 2 4 5 7 1 3 2 6 merge (6-6, 7-7) to 2 4 5 7 1 3 2 6 merge (4-5, 6-7) to 2 4 5 7 1 2 3 6 merge (0-3, 4-7) to 1 2 2 3 4 5 6 7
sort函数把a[start..end]平均分成两个子序列,分别是a[start..mid]和a[mid+1..end],对这两个子序列分别递归调用sort函数进行排序,然后调用merge函数将排好序的两个子序列合并起来,由于两个子序列都已经排好序了,合并的过程很简单,每次循环取两个子序列中最小的元素进行比较,将较小的元素取出放到最终的排序序列中,如果其中一个子序列的元素已取完,就把另一个子序列剩下的元素都放到最终的排序序列中。为了便于理解程序,我在sort函数开头和结尾插了打印语句,可以看出调用过程是这样的:

图中S表示sort函数,M表示merge函数,整个控制流程沿虚线所示的方向调用和返回。由于sort函数递归调用了自己两次,所以各函数之间的调用关系呈树状结构。画这个图只是为了清楚地展现归并排序的过程,读者在理解递归函数时一定不要全部展开来看,而是要抓住Base
Case和递推关系来理解。我们分析一下归并排序的时间复杂度,以下分析出自[算法导论]。
首先分析merge函数的时间复杂度。在merge函数中演示了C99的新特性--可变长数组,当然也可以避免使用这一特性,比如把left和right都按最大长度LEN分配。不管用哪种办法,定义数组并分配存储空间的执行时间都可以看作常数,与数组的长度无关,常数用Θ-notation记作Θ(1)。设子序列a[start..mid]的长度为n1,子序列[mid+1..end]的长度为n2,a[start..end]的总长度为n=n1+n2,则前两个for循环的执行时间是Θ(n1+n2),也就是Θ(n),后面三个for循环合在一起看,每走一次循环就会在最终的排序序列中确定一个元素,最终的排序序列共有n个元素,所以执行时间也是Θ(n)。两个Θ(n)再加上若干常数项,merge函数总的执行时间仍是Θ(n),其中n=end-start+1。
然后分析sort函数的时间复杂度,当输入长度n=1,也就是start==end时,if条件不成立,执行时间为常数Θ(1),当输入长度n>1时:
总的执行时间 = 2 × 输入长度为n/2的sort函数的执行时间 + merge函数的执行时间Θ(n)
设输入长度为n的sort函数的执行时间为T(n),综上所述:

这是一个递推公式(Recurrence),我们需要消去等号右侧的T(n),把T(n)写成n的函数。其实符合一定条件的Recurrence的展开有数学公式可以套,这里我们略去严格的数学证明,只是从直观上看一下这个递推公式的结果。当n=1时可以设T(1)=c1,当n>1时可以设T(n)=2T(n/2)+c2n,我们取c1和c2中较大的一个设为c,把原来的公式改为:

这样计算出的结果应该是T(n)的上界。下面我们把T(n/2)展开成2T(n/4)+cn/2(下图中的(c)),然后再把T(n/4)进一步展开,直到最后全部变成T(1)=c(下图中的(d)):

把图(d)中所有的项加起来就是总的执行时间。这是一个树状结构,每一层的和都是cn,共有lgn+1层,因此总的执行时间是cnlgn+cn,相比nlgn来说,cn项可以忽略,因此T(n)的上界是Θ(nlgn)。
如果先前取c1和c2中较小的一个设为c,计算出的结果应该是T(n)的下界,然而推导过程一样,结果也是Θ(nlgn)。既然T(n)的上下界都是Θ(nlgn),显然T(n)就是Θ(nlgn)。
和插入排序的平均情况相比归并排序更快一些,虽然merge函数的步骤较多,引入了较大的常数、系数和低次项,但是对于较大的输入长度n,这些都不是主要因素,归并排序的时间复杂度是Θ(nlgn),而插入排序的平均情况是Θ(n2),这就决定了归并排序是更快的算法。但是不是任何情况下归并排序都优于插入排序呢?哪些情况适用插入排序而不适用归并排序?留给读者思考。
1、快速排序是另外一种采用分而治之策略的排序算法,在平均情况下的时间复杂度也是Θ(nlgn),但比归并排序有更小的时间常数。它的基本思想是这样的:
int partition(int start, int end)
{
从a[start..end]中选取一个pivot元素(比如选a[start]为pivot);
在一个循环中移动a[start..end]的数据,将a[start..end]分成两半,
使a[start..mid-1]比pivot元素小,a[mid+1..end]比pivot元素大,而a[mid]就是pivot元素;
return mid;
}
void quicksort(int start, int end)
{
int mid;
if (end > start) {
mid = partition(start, end);
quicksort(start, mid-1);
quicksort(mid+1, end);
}
}
请补完partition函数,这个函数有多种写法,请选择时间常数尽可能小的实现方法。想想快速排序在最好和最坏情况下的时间复杂度是多少?快速排序在平均情况下的时间复杂度分析起来比较复杂,有兴趣的读者可以参考[算法导论]。
有些查找问题要用时间复杂度为O(n)的算法来解决。例如写一个indexof函数,从任意输入字符串中找出某个字母的位置并返回这个位置,如果找不到就返回-1:
例 11.3. 线性查找
#include <stdio.h>
char a[]="hello world";
int indexof(char letter)
{
int i = 0;
while (a[i] != '\0') {
if (a[i] == letter)
return i;
i++;
}
return -1;
}
int main(void)
{
printf("%d %d\n", indexof('o'), indexof('z'));
return 0;
}
这个实现是最直观和最容易想到的,但它是不是最快的算法呢?我们知道插入排序也比归并排序更容易想到,但通常不如归并排序快。那么现在这个问题--给定一个随机排列的序列,找出其中某个元素的位置--有没有比O(n)更快的算法?比如O(lgn)?请读者思考一下。
1、实现一个算法,在一组随机排列的数中找出最小的一个。你能想到的最直观的算法一定是Θ(n)的,想想有没有比Θ(n)更快的算法?
2、在一组随机排列的数中找出第二小的,这个问题比上一个稍复杂,你能不能想出Θ(n)的算法?
3、进一步泛化,在一组随机排列的数中找出第k小的,这个元素称为k-th Order Statistic。能想到的最直观的算法肯定是先把这些数排序然后取第k个,时间复杂度和排序算法相同,可以是Θ(nlgn)。这个问题虽然比前两个问题复杂,但它也有平均情况下时间复杂度是Θ(n)的算法,将上一节习题1的快速排序算法稍加修改就可以解决这个问题:
/* 从start到end之间找出第k小的元素 */
int order_statistic(int start, int end, int k)
{
用partition函数把序列分成两半,中间的pivot元素是序列中的第i个;
if (k == i)
返回找到的元素;
else if (k > i)
从后半部分找出第k-i小的元素并返回;
else
从前半部分找出第k小的元素并返回;
}
请编程实现这个算法。
如果不是从一组随机的序列里查找,而是从一组排好序的序列里找出某个元素的位置,则可以有更快的算法:
例 11.4. 折半查找
#include <stdio.h>
#define LEN 8
int a[LEN] = { 1, 2, 2, 2, 5, 6, 8, 9 };
int binarysearch(int number)
{
int mid, start = 0, end = LEN - 1;
while (start <= end) {
mid = (start + end) / 2;
if (a[mid] < number)
start = mid + 1;
else if (a[mid] > number)
end = mid - 1;
else
return mid;
}
return -1;
}
int main(void)
{
printf("%d\n", binarysearch(5));
return 0;
}
由于这个序列已经从小到大排好序了,每次取中间的元素和待查找的元素比较,如果中间的元素比待查找的元素小,就说明“如果待查找的元素存在,一定位于序列的后半部分”,这样可以把搜索范围缩小到后半部分,然后再次使用这种算法迭代。这种“每次将搜索范围缩小一半”的思想称为折半查找(Binary Search)。思考一下,这个算法的时间复杂度是多少?
这个算法的思想很简单,不是吗?可是[编程珠玑]上说作者在课堂上讲完这个算法的思想然后让学生写程序,有90%的人写出的程序中有各种各样的Bug,读者不信的话可以不看书自己写一遍试试。这个算法容易出错的地方很多,比如mid = (start + end) / 2;这一句,在数学概念上其实是mid = ⌊(start +
end) / 2⌋,还有start = mid + 1;和end = mid -
1;,如果前者写成了start = mid;或后者写成了end =
mid;那么很可能会导致死循环(想一想什么情况下会死循环)。
怎样才能保证程序的正确性呢?在第 2 节 “插入排序”我们讲过借助Loop
Invariant证明循环的正确性,binarysearch这个函数的主体也是一个循环,它的Loop
Invariant可以这样描述:待查找的元素number如果存在于数组a之中,那么一定存在于a[start..end]这个范围之间,换句话说,在这个范围之外的数组a的元素中一定不存在number这个元素。以下为了书写方便,我们把这句话表示成mustbe(start,
end, number)。可以一边看算法一边做推理:
int binarysearch(int number)
{
int mid, start = 0, end = LEN - 1;
/* 假定a是排好序的 */
/* mustbe(start, end, number),因为a[start..end]就是整个数组a[0..LEN-1] */
while (start <= end) {
/* mustbe(start, end, number),因为一开始进入循环时是正确的,每次循环也都维护了这个条件 */
mid = (start + end) / 2;
if (a[mid] < number)
/* 既然a是排好序的,a[start..mid]应该都比number小,所以mustbe(mid+1, end, number) */
start = mid + 1;
/* 维护了mustbe(start, end, number) */
else if (a[mid] > number)
/* 既然a是排好序的,a[mid..end]应该都比number大,所以mustbe(start, mid-1, number) */
end = mid - 1;
/* 维护了mustbe(start, end, number) */
else
/* a[mid] == number,说明找到了 */
return mid;
}
/*
* mustbe(start, end, number)一直被循环维护着,到这里应该仍然成立,在a[start..end]范围之外一定不存在number,
* 但现在a[start..end]是空序列,在这个范围之外的正是整个数组a,因此整个数组a中都不存在number
*/
return -1;
}
注意这个算法有一个非常重要的前提--a是排好序的。缺了这个前提,“如果a[mid] < number,那么a[start..mid]应该都比number小”这一步推理就不能成立,这个函数就不能正确地完成查找。从更普遍的意义上说,函数的调用者(Caller)和函数的实现者(Callee,被调用者)之间订立了一个契约(Contract),在调用函数之前,Caller要为Callee提供某些条件,比如确保a是排好序的,确保a[start..end]都是有效的数组元素而没有访问越界,这称为Precondition,然后Callee对一些Invariant进行维护(Maintenance),这些Invariant保证了Callee在函数返回时能够对Caller尽到某些义务,比如确保“如果number在数组a中存在,一定能找出来并返回它的位置,如果number在数组a中不存在,一定能返回-1”,这称为Postcondition。如果每个函数的文档都非常清楚地记录了Precondition、Maintenance和Postcondition是什么,那么每个函数都可以独立编写和测试,整个系统就会易于维护。这种编程思想是由Eiffel语言的设计者Bertrand
Meyer提出来的,称为Design by Contract(DbC)。
测试一个函数是否正确需要把Precondition、Maintenance和Postcondition这三方面都测试到,比如binarysearch这个函数,即使它写得非常正确,既维护了Invariant也保证了Postcondition,如果调用它的Caller没有保证Precondition,最后的结果也还是错的。我们编写几个测试用的Predicate函数,然后把相关的测试插入到binarysearch函数中:
例 11.5. 带有测试代码的折半查找
#include <stdio.h>
#include <assert.h>
#define LEN 8
int a[LEN] = { 1, 2, 2, 2, 5, 6, 8, 9 };
int is_sorted(void)
{
int i;
for (i = 1; i < LEN; i++)
if (a[i-1] > a[i])
return 0;
return 1;
}
int mustbe(int start, int end, int number)
{
int i;
for (i = 0; i < start; i++)
if (a[i] == number)
return 0;
for (i = end+1; i < LEN; i++)
if (a[i] == number)
return 0;
return 1;
}
int contains(int n)
{
int i;
for (i = 0; i < LEN; i++)
if (a[i] == n)
return 1;
return 0;
}
int binarysearch(int number)
{
int mid, start = 0, end = LEN - 1;
assert(is_sorted()); /* Precondition */
while (start <= end) {
assert(mustbe(start, end, number)); /* Maintenance */
mid = (start + end) / 2;
if (a[mid] < number)
start = mid + 1;
else if (a[mid] > number)
end = mid - 1;
else {
assert(mid >= start && mid <= end
&& a[mid] == number) /* Postcondition 1 */
return mid;
}
}
assert(!contains(number)); /* Postcondition 2 */
return -1;
}
int main(void)
{
printf("%d\n", binarysearch(5));
return 0;
}
assert是头文件assert.h中的一个宏定义,执行到assert(is_sorted())这句时,如果is_sorted()返回值为真,则当什么事都没发生过,继续往下执行,如果is_sorted()返回值为假(例如把数组的排列顺序改一改),则报错退出程序:
main: main.c:33: binarysearch: Assertion `is_sorted()' failed. Aborted
在代码中适当的地方使用断言(Assertion)可以有效地帮助我们测试程序。也许有人会问:我们用几个测试函数来测试binarysearch,那么这几个测试函数又用什么来测试呢?在实际工作中我们要测试的代码绝不会像binarysearch这么简单,而我们编写的测试函数往往都很简单,比较容易保证正确性,也就是用简单的、不容易出错的代码去测试复杂的、容易出错的代码。
测试代码只在开发和调试时有用,如果正式发布(Release)的软件也要运行这些测试代码就会严重影响性能了,如果在包含assert.h之前定义一个NDEBUG宏(表示No Debug),就可以禁用assert.h中的assert宏定义,这样代码中的所有assert测试都不起作用了:
#define NDEBUG #include <stdio.h> #include <assert.h> ...
注意NDEBUG和我们以前使用的宏定义有点不同,例如#define N
20将N定义为20,在预处理时把代码中所有的标识符N替换成20,而#define NDEBUG把NDEBUG定义为空,在预处理时把代码中所有的标识符NDEBUG替换成空。这样的宏定义主要是为了用#ifdef等预处理指示测试它定义过没有,而不是为了做替换,所以定义成什么值都无所谓,一般定义成空就足够了。
还有另一种办法,不必修改源文件,在编译命令行加上选项-DNDEBUG就相当于在源文件开头定义了NDEBUG宏。宏定义和预处理到第 21 章
预处理再详细解释,在第 4 节 “其它预处理特性”将给出assert.h一种实现。
1、本节的折半查找算法有一个特点:如果待查找的元素在数组中有多个则返回其中任意一个,以本节定义的数组int a[8] = { 1, 2, 2, 2,
5, 6, 8, 9 };为例,如果调用binarysearch(2)则返回3,即a[3],而有些场合下要求这样的查找返回a[1],也就是说,如果待查找的元素在数组中有多个则返回第一个。请修改折半查找算法实现这一特性。
2、编写一个函数double mysqrt(double y);求y的正平方根,参数y是正实数。我们用折半查找来找这个平方根,在从0到y之间必定有一个取值是y的平方根,如果我们查找的数x比y的平方根小,则x2<y,如果我们查找的数x比y的平方根大,则x2>y,我们可以据此缩小查找范围,当我们查找的数足够准确时(比如满足|x2-y|<0.001),就可以认为找到了y的平方根。思考一下这个算法需要迭代多少次?迭代次数的多少由什么因素决定?
3、编写一个函数double mypow(double x, int n);求x的n次方,参数n是正整数。最简单的算法是:
double product = 1; for (i = 0; i < n; i++) product *= x;
这个算法的时间复杂度是Θ(n)。其实有更好的办法,比如mypow(x,
8),第一次循环算出x·x=x2,第二次循环算出x2·x2=x4,第三次循环算出4·x4=x8。这样只需要三次循环,时间复杂度是Θ(lgn)。思考一下如果n不是2的整数次幂应该怎么处理。请分别用递归和循环实现这个算法。
从以上几题可以看出,折半查找的思想有非常广泛的应用,不仅限于从一组排好序的元素中找出某个元素的位置,还可以解决很多类似的问题。[编程珠玑]对于折半查找的各种应用和优化技巧有非常详细的介绍。
本章节摘自《Linux C编程一站式学习》
https://akaedu.github.io/book/
版权 © 2008, 2009 宋劲杉, 北京亚嵌教育研究中心
Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free
Documentation License,
Version 1.3 or any later version published by the Free Software Foundation; with the Invariant
Sections
being 前言,
with no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in
GNU Free Documentation License Version 1.3, 3 November 2008.
